 |
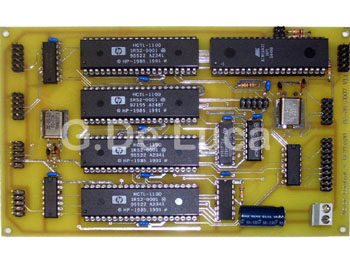
FPGA - 8 Axis Real-Time Motion controller for
ARIES ROBOT (multi link arm)
8 Encoder 100-2000 impusi giro
8 Digital filter
8 Quadrature decoder
8 Controllori PID Hardware (FPGA)
8 24bit signed position counter
|
|
 |
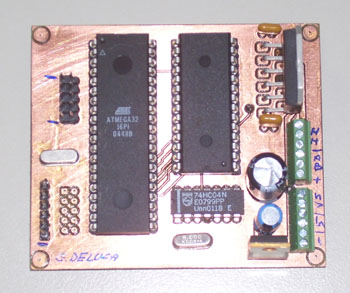
MOTOR CONTROLLER for DUAL DRIVE ROBOT
2 Motori 12/24 Volt 3A
2 Encoder 100-500 impulsi/giro
2 Controllori PID Hardware HCTL1100
1 Microcontrollore ATMEGA32
Controllo di posizione - profilo trapezoidale
Controllo di velocità integrale e proporzionale
Interfaccia TTL - 232
|
|
 |
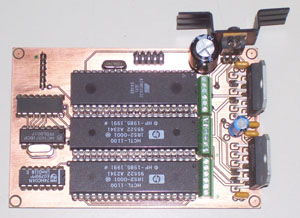
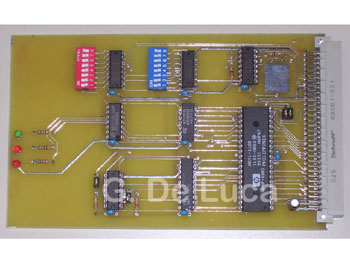
MOTOR CONTROLLER con LM629
1 Motore 12/24 Volt 3A
1 Encoder 100-500 impulsi/giro
1 Controllore PID Hardware LM629
1 Microcontrollore ATMEGA32
Controllo di posizione - profilo trapezoidale
Controllo di velocità integrale e proporzionale
Interfaccia TTL - 232
|
|
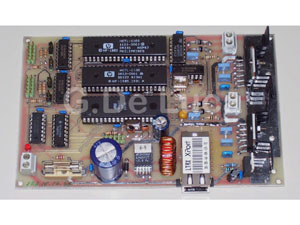 |
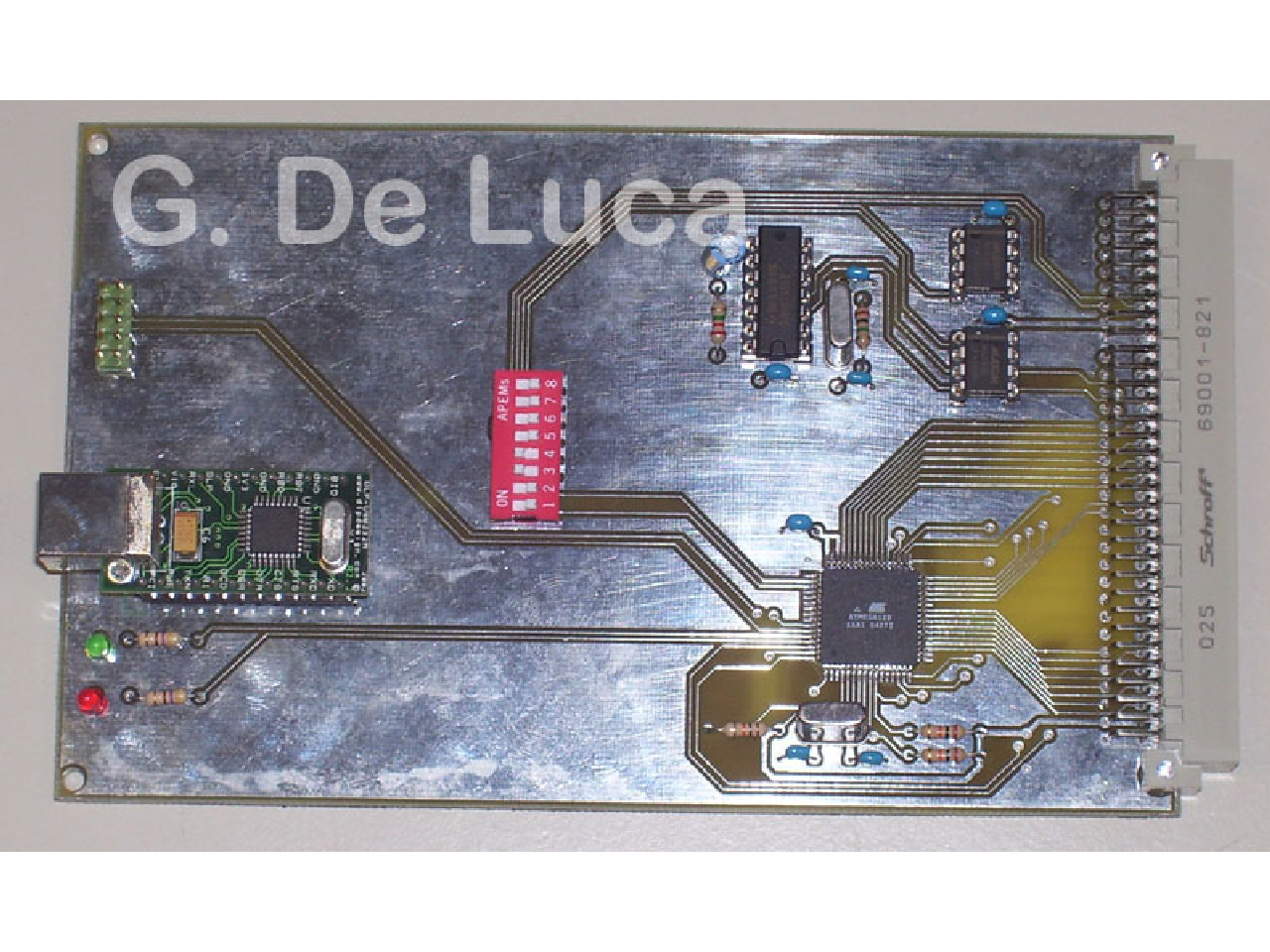
ETMC-V1 Ethernet Motor Control vers.1
2 Motori 12/24 Volt 3A
2 Encoder 100-500 impulsi/giro
2 Controllori PID Hardware HCTL1100
1 Microcontrollore ATMEGA32
Controllo di posizione
Controllo di velocità
Controllo di posizione con profilo trapezoidale
Interfaccia USB / Ethernet 10/100
|
|
 |
ETMC-V1 Ethernet Motor Control vers.2
2 Motori 12/24 Volt 3A
2 Encoder 100-500 impulsi/giro
2 Controllori PID Hardware HCTL1100
1 Microcontrollore ATMEGA32
Controllo di posizione
Controllo di velocità, controllo della coppia max
Controllo di posizione con profilo trapezoidale
Interfaccia USB / Ethernet 10/100
|
|
 |
ETMC-V1 Ethernet Motor Control vers.3
2 Motori 12/24 Volt 3A
2 Encoder 100-500 impulsi/giro
2 Controllori PID Hardware HCTL1100
Controllo di posizione
Controllo di velocità, controllo della coppia max
Controllo di posizione con profilo trapezoidale
Interfaccia USB / Ethernet 10/100
|
|
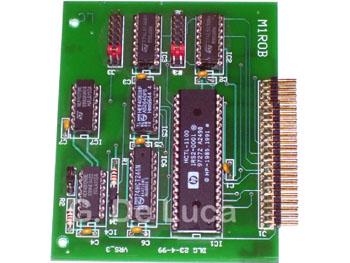 |
PID-1100 vers.1
Encoder 100-500 impulsi/giro
Controllore PID Hardware HCTL1100
Controllo di posizione
Controllo di velocità
Controllo di posizione con profilo trapezoidale
Gestione modulare indirizzabile
Interfaccia Bus Parallelo
|
|
 |
PID-1100 vers.2
Encoder 100-500 impulsi/giro
Controllore PID Hardware HCTL1100
Controllo di posizione
Controllo di velocità
Controllo di posizione con profilo trapezoidale
Gestione modulare indirizzabile
Interfaccia Bus Parallelo
|
|
 |
QUAD Motor Control - 32
4 Encoder 100-500 impulsi/giro
4 Controllori PID Hardware HCTL1100
Controllo di posizione
Controllo di velocità
Controllo di posizione con profilo trapezoidale
Gestione modulare indirizzabile
Interfaccia RS232-TTL
|
|
 |
DUAL DRIVE MOT-V32
2 Controlli PID Firmware
1 Microcontrollore ATMEGA32
2 Motori 12/24 Volt 3A
2 Encoder 100/500 impulsi/giro
Interfaccia USB / o Ethernet 10/100
|
|
 |
uC Motor Control v1
ATmega103
Scheda a microcontrollore per gestione sistema controllo motori modulare
Iinterfaccia RS232 - RS422
|
|
 |
uC Motor Control v2
ATmega128
Scheda a microcontrollore per gestione sistema controllo motori modulare
Interfaccia USB / Ethernet 10/100
|
|
 |
Magnex - Inverter Power Motor Control
Encoder 100-2000 impulsi/giro
Microcontrollore ATMEGA32
Scheda a microcontrollore per gestione e controllo inverter OMRON
ModBus RS422 Interface
4 Uscite Optoisolate
|
|
 |
DRV-6203 v1
Scheda Driver 3-Amper per alimentazione motori 12/24 Volt DC
Regolazione PWM
Sistema modulare
|
|
 |
MTB-04 v1
Mother Board per sistema modulare controllo 4-assi
|
|
 |
DRV-6203 v2
Scheda Driver 3-Amper per alimentazione motori 12/24 Volt DC
Regolazione PWM
Sistema modulare
|
|
 |
20A - Power Drive Motor Control
Scheda Driver 20-Amper per alimentazione motori 24/48 Volt DC
Regolazione on-board della corrente max
|